地面电位差会对精确的示波器测量造成严重破坏,尤其是单端示波器——在这里,你的读数总是会有偏移误差。
为了说明这个问题,我们将从一个非常简单的测量开始,并以我们的方式进入更复杂、更现实的场景,通过推动将会发生的事情来故意使事情出错。
使用的场景包括一个PC提供5伏特的USB集线器。我们将使用单端示波器(像一个普通的桌面示波器)来测量5v。为了简单和说明,我们将使用一个理想的5v源,这样我们在模拟范围轨迹上看到的所有失真都将来自外部因素。
Envision将TEK范围插入120V墙壁插座,我们的电脑进入TEK上游的不同壁出口,但在相同的120V分支电路上。为简单起见,我们将使用120V RMS DC而不是120V RMS AC作为我们的墙壁出口功率。我们不希望在TEK或PC中模拟整流器;但是对使用DC而不是AC的范围迹线的影响将是相似的;与它相似,它将清楚发生了什么。
我们将采用现实的电流和电线尺寸,但故意在最佳说明衡量扭曲的方向上。对于我们的模拟,我们会说PC绘制3次的标称电流,示波器绘制1A的标称电流。这些被建模为模拟中的电流源。

我们的模拟示波器位于原理图中的OSC(探针)处。正如预期的那样,示波器上的测量值是一个稳定的5v。

但这真的不是现实。实际上,我们的探针导线存在一些阻力。通常探头电线很小;让我们假设24 AWG和3英尺的探针长度。

给定标准线规电阻,我们将有一个约77mΩs的电阻。(3 * 25.67/1000 ~ 77Ω)。
让我们重写我们的电路,包括77MΩ探头导线电阻。

我们再次在示波器上得到一个稳定的5v测量值。

但这不是现实。实际上,我们的电源线存在一些阻力,即将PC和示波器插入墙壁。我们将假设电源线为18架,两者均为6英尺。使用我们的图表,电源线将存在约38MΩ的电阻(6 * 6.385 / 1000 =〜38mΩ)。
让我们重新绘制包含38mΩ电源线电阻的电路。

但现在我们在示波器测量中看到了40mV的偏移错误。

如果我们看看探头接地电流,我们认为目前有500mA(1 / 2amp)的电流经过我们的小型24 AWG探针接地线。通过正探针线几乎没有电流。
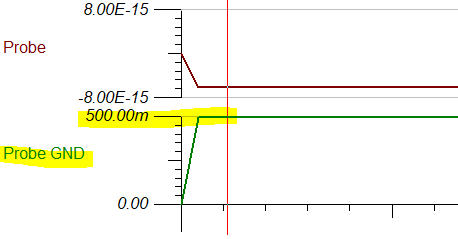
发生了什么,示波器和PC有不同的内部接地电位,因为它们各自的电源线的IR降。我们可以看到有一个38.25mV的不同(我们的0.5a * 77mΩ = ~38mV)

但是,这并不是现实。在实际应用中,PC机与示波器之间的壁支电路存在一定的电阻。现在一个15安培的分支电路通常使用14 AWG电线。让我们假设我们的PC在示波器的上风位置,两个墙插座之间相距10英尺。根据我们的图表,这将产生一个约25mΩ (10*2.525/1000 = ~25mΩ)的壁阻力。S.
要继续,让我们更新我们的原理图,以包括我们仪器之间的25MΩ墙壁电阻。

现在我们在示波器上测量5.07v,一个70mV的偏移误差。我们的24awg探针地线通过了848mA,现在PC和示波器内部地线的差值是65mV。

但这仍然不是现实。实际上,除了PC和示波器之外,可能还有其他东西插入我们的墙壁分支电路。我们的墙壁电路可以从分支断路器提供15个放大器。我们的PC需要3A,或示波器需要1A,让我们在分支电路上添加一些大上游的东西,说7A设备。
我们把它加到电路中。

现在我们在示波器上测量5.14mV,偏移误差为140mV!我们的24awg探针地线通过1.83安培!探针地线可能会变热!

但这真的不是现实。实际上,PC和示波器中可能有一些开关噪音。让我们模拟PC上的500mA 100kHz方波,示波器上的250mA 500kHz三角波。
我们把它加到电路中。

我们在示波器测量中看到了34.6mV的纹波!

但是让我们不要停止!让我们在墙壁分支电路上添加上游嘈杂的设备。现在通常它可能是60Hz,但这将很难展示,所以我们将在电路上放一个3A 200kHz的正弦波设备。我们选择了200kHz,所以我们可以轻松地看到模拟示波器轨迹的影响。实际上,它可能是一个较低的频率设备,但效果仍然存在。
为了有趣,让我们将其添加到我们的墙壁分支电路中。

现在我们在示波器上测量到了近100mV的纹波,而且波形非常难看!

所以,我们在这里,用我们昂贵的泰克示波器,试图从我们的PC上测量一个稳定的5v信号源;我们看到了什么?我们看到140mV的混乱信号偏移!

我们漂亮的5V输出不再看起来很好,但它真的不是真的,它是一个范围测量失真,因为区分地参考。
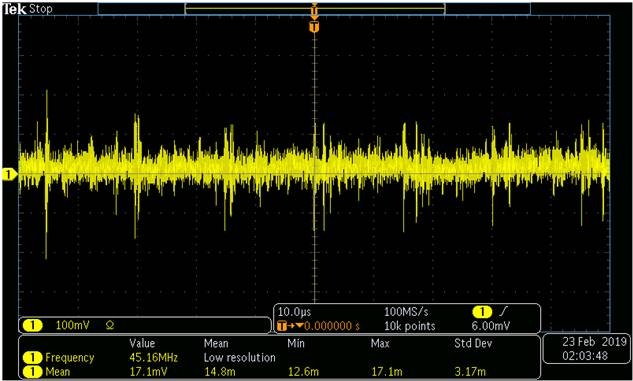
现在让我们看看我桌上有什么;真实世界的情况。让我们用我的安捷伦DMM(它有一个独立的地面)来测量我的PC USB地面与我们的泰克(Tektronix)的地面(地对地)。我们看到PC和Tek之间的地面差异为95mV。这是由于在电源线和在墙上的布线,分支电路的IR下降。

但是,要小心;即使这显示了95mV的差值,只要我接通探针的地线,地线就会通过探针的地线平衡,差值就会大大减小。但是,在探针地线上会有一个IR下降,这就是在示波器轨迹上显示的偏移误差。例如,当我们将探针地面连接到我的PC上时,我的偏移误差下降到5.5mV;在现实中,我们通常在我的Tek上看到5-15mV的偏移误差。
使用差分探头(接地到地面),我们可以看到数百个MV的噪声(可能是开关噪声)。这一切都将显示在任何范围轨迹上都显示出额外的噪音。
那么我们该如何解决这个问题呢?我们如何看到真正存在的东西?
- 理想情况下,如果我们可以获得所测试的范围和设备,并且在没有开关噪音的情况下具有相同的地面潜力,我们的单端范围就可以正常工作。
- 我们可以做的一件事就是用一根很重的线将范围的地基和被测装置连接起来;减少,但不是说明,地面的差异。
- 使用与孤立的地面的范围。
- 这将使范围将漂浮到与正在测试的单元相同的地面电位。
- 仍然存在一些电容耦合,可以允许干扰影响信号测量,但通常这是最小的。
- 这openscope.和openlog通过切断电池电源,用WiFi和它们交谈,就可以有一个孤立的地面。这将范围与任何外部干扰完全隔离开来。
- 这将使范围将漂浮到与正在测试的单元相同的地面电位。
- 使用差分探头
- 这允许一个探头跟踪测试地面下的单元,而另一个探头测量相对于地面的信号。
- 但是差分探针很昂贵。如果我需要,就得借。
- 在范围上使用平均来消除噪音,并知道标称偏移错误是什么。
- 我大部分时间都是这么做的。
- 有时候,你就是不知道什么是真实,什么是干扰。判断和与他人讨论是最好的选择。
这个博文帖子由礼貌提供基斯沃格尔。