准备NI周,Josh和我决定创造马特机器人!我们用了LabVIEW.那chipkit wf32.那LabVIEW makerhub linx.,力传感器,apmodacl.读取加速度值,apmodjstk.为了控制迷你伺服的角度,一个迷你伺服,可容纳矛杆,以及车轮的两个连续伺服伺服。该项目的一般思想是创建一个可以通过WiFi控制的机器人,并将数据发送回LabVIEW。这LabVIEW物理计算套件包括LabVIEW Home Bundle.和Chipkit WF32可用于此项目。看到我们勇敢的骑士:

我在接线机器人的所有部分和一个可指示的指示器上创建了一个指示,该指示,提供了深入的LabVIEW代码步行,而Josh在组装机器人的不同部分创建了一个可指示。
在我的布线指南中,我越过如何使用分压器从力传感器接收模拟读数,我如何连线I2C沟通在PMODACL和WF32之间,我如何有线SPI交流在PMODJSTK和WF32之间,以及如何将所有不同伺服连接到WF32。一切都连接后,机器人看起来像这样:

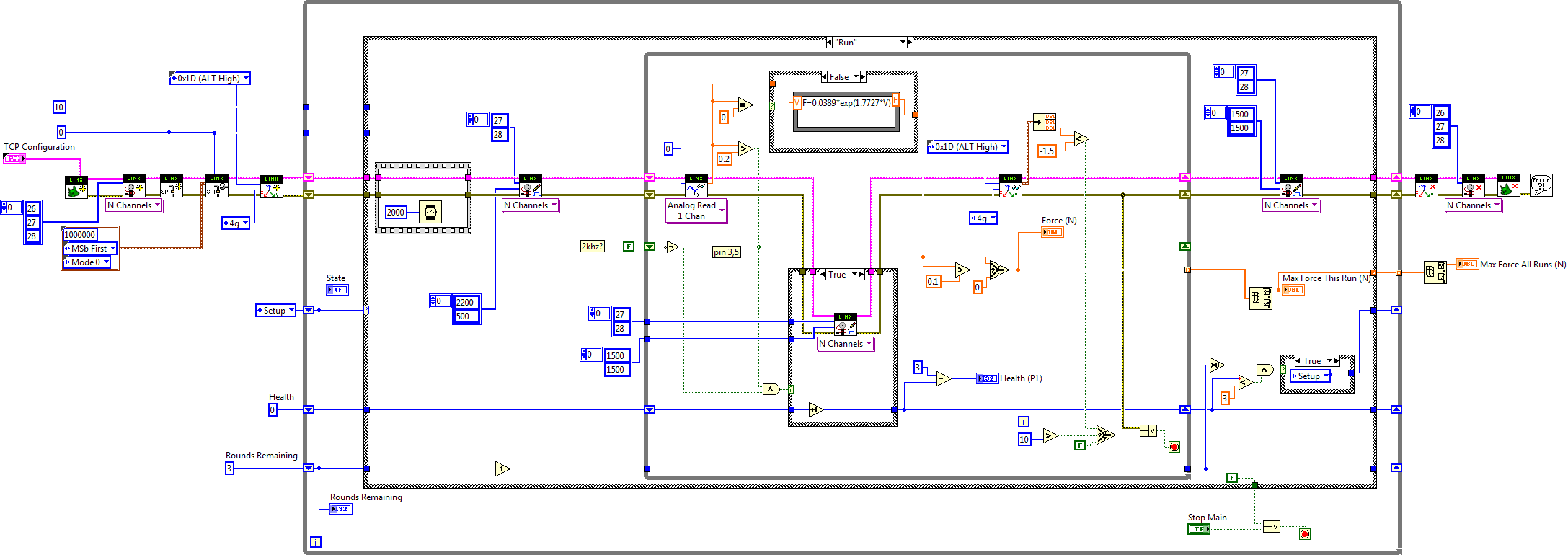
我的其他指导是我的LabVIEW代码的一步一步解释。基本上,使用PMOD操纵杆设置安装在迷你伺服上的“LANCE”的角度。按下PMODJSTK上的按钮后,机器人会进入运行状态。在这种状态下,伺服电机运行,直到感测力或者机器人被拾取。一旦机器人被拾取后,否则否则否则否则否则否则否则否则否则除非有3个马力绕组,在这种情况下,否则将返回设置状态,在这种情况下,JOUSTING会话结束。
每个机器人都有三个命中点,在运行状态期间开始,如果力越过一定值,则命中点逐渐减小。如果命中点减少为零,则马力会话将结束。以下是我完成的LabVIEW代码的图片。查看可说明以查看其他州的编码方式。
对我们的摇摆机器人感兴趣?查看我们所有的三个威力(1那2那3.)看看如何组装零件,电线机器人,并使用我的编码指导中给出的LabVIEW代码控制它们。随着添加到LabVIEW代码和/或添加更多PMOD,可以随意探索您可以添加的其他功能。